{kind=link}
{kind=link}
{kind=link}
{kind=link}
Content¶
A being.content.Content instance manages all user defined motion
curves inside a directory. Curves are saved as JSON files in this folder.
Blocks are the main building blocks in being (pun intended). Each block encapsulates certain functionalities and can pass data to and from its neighbors.

Some connected blocks.¶
Connecting blocks takes place by connecting their output & input connectables. There are two types of connections:
Value (⇢) connections are intended for continuous streams of data. Think
audio samples or motor position values. Accessed via the value
attributes.
Message (→) connections send and receive discrete messages.
This results in 4 different connectable types:
Output |
Input |
|
Value |
||
Message |
Outputs and inputs can be connected with the connect method.
It is possible to connect one output to multiple inputs but not the other way round (multiple outputs to one single input).

Output connectable with multiple inputs.¶
Data can be passed around with the value attribute and the send / receive methods.
The following snippets illustrate how data can propagate for value and message based connections respectively.
"""Value connection."""
from being.connectables import ValueOutput, ValueInput
valueOut = ValueOutput()
valueIn = ValueInput()
valueOut.connect(valueIn)
valueOut.value = 42
print(valueIn.value) # Prints 42
"""Message connection."""
from being.connectables import MessageOutput, MessageInput
msgOut = MessageOutput()
msgIn = MessageInput()
msgOut.connect(msgIn)
msgOut.send('Hello, world!')
for msg in msgIn.receive():
print(msg) # Prints 'Hello, world!'
Each block has the following connectable attributes:
being.block.Block.inputs: All input connectables.
being.block.Block.outputs: All output connectables.
being.block.Block.input: First / primary input connectable.
being.block.Block.output: First /primary output connectable.
The pipe operator | can be used to chain multiple blocks via their primary
inputs and outputs
# Pipe operator for 3x blocks
a | b | c
# Is equivalent to:
# >>> a.output.connect(b.input)
# ... b.output.connect(c.input)
#
# or
#
# >>> a.outputs[0].connect(b.inputs[0])
# ... b.outputs[0].connect(c.inputs[0])
The blocks together with the connections form a block network. This is a
directed graph and forms the core of every being program. Given such a block
network being will try to find a suitable execution order of these blocks and
tick every block once per cycle by calling its being.block.Block.update()
method.

Directed graph with cycle¶
Resulting execution order is [A, B, C, D] although C and D could be swapped depending on the insertion order.
from being.block import Block
from being.execution import determine_execution_order
class Foo(Block):
"""Example block printing and passing on messages."""
def __init__(self):
super().__init__()
self.add_message_input()
self.add_message_output()
def update(self):
for msg in self.input.receive():
first, *rest = msg
print(first)
self.output.send(rest)
# Initializing blocks
a = Foo()
b = Foo()
c = Foo()
# Making the connections
a | b | c
# Determining the execution order. One initial block of the network
# suffices (vertex discovery)
execOrder = determine_execution_order([b])
# Executing a single cycle with some data
a.input.push(['Hello', 'world', '!'])
for block in execOrder:
block.update()
This will output
Hello
world
!
When running a being block network with the being.awakening.awake()
function the execution order will be executed indefinitely. The interval
duration is taken from being.configuration.
In order to add new possible user input on the fly being has so called Parameter Blocks. Each of these blocks outputs a value and appears in the UI as widget with which the value can be changed. The state of these parameter blocks gets mirrored in a config file on disk so that the parameter stay persistent between subsequent runs.
"""Parameter block demo."""
from being.awakening import awake
from being.block import Block
from being.params import Slider, SingleSelection, MultiSelection, MotionSelection
block = Block()
# Creating new ad-hoc value inputs and connecting them the parameter blocks
Slider('Some/Value') | block.add_value_input()
SingleSelection('Some/Single', ['first', 'second', 'third']) | block.add_value_input()
MultiSelection('Some/Multi', ['first', 'second', 'third']) | block.add_value_input()
MotionSelection('Motions') | block.add_value_input()
awake(block)
In the UI this looks like this:
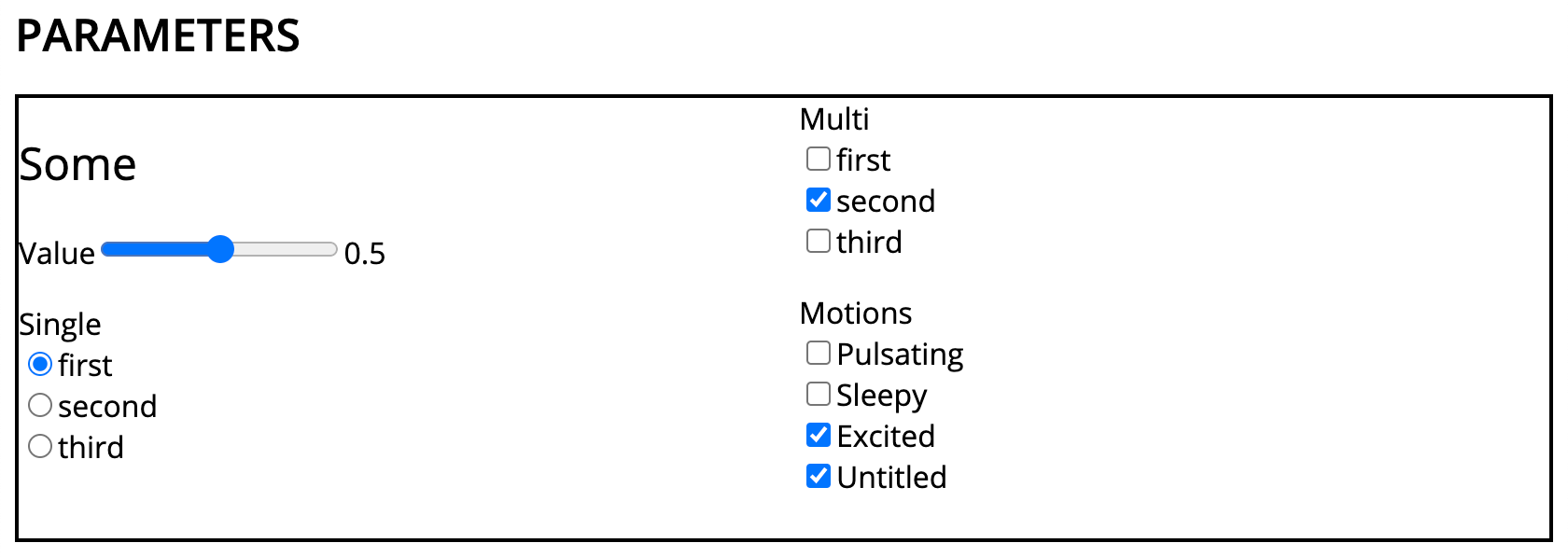
Parameter panel¶
And the being_params.yaml config file
Some:
Value: 0.5
Single: first
Multi:
- second
Motions:
- Excited
- Untitled
JSON, INI and TOML are also supported although INI is not suited for the usage with parameters blocks (no support for nested mappings and datatypes).
JSON serialization of the different being object is defined in
being.serialization. Custom types get mapped to and from dictionary
representation which can be converted to JSON strings.
This conversion is taken care by being.serialization.dumps() and
being.serialization.loads().

JSON serialization of being objects.¶
It is also possible to serialize named tuples and enums. But these types have
to be registered after creation
(being.serialization.register_named_tuple() and
being.serialization.register_enum()).
from typing import NamedTuple
from being.serialization import register_named_tuple, dumps
class Foo(NamedTuple):
first: str = 'hello'
second: int = 42
register_named_tuple(Foo)
foo = Foo(second=1234)
print(dumps(foo))
# {"type": "Foo", "first": "hello", "second": 1234}
When running a Being program a web based user interface gets started up. This
allows the user to interact with the system in real-time. Depending on the used
blocks some HTML templating is involved for generating the single page. But for
the most part communication between front- and backend takes place over a HTTP
based API and a web socket connection to exchange asynchronous messages and
updates. Everything web related can be found in the being.web package
together with the static files and the JavaScript code.
The frontend is grouped in different widgets. Each widget is its own web Web Components. Most widgets will fetch some initial data and then receive subsequent updates via the web socket connection.
Basic network functionality is implemented in the
being.networking.NetworkOut and being.networking.NetworkIn
blocks. These blocks send and receive being messages as UDP datagrams. This
makes it possible to split a being program over multiple computers. The message
types must be serializable by being. Use standard Python types like a
dictionary or register your custom types with the being serialization system.
System resources have limited availability and need to be released when the
program shuts down. In the context of being this refers to the CAN interface
and network sockets. These resources are handled by a global
contextlib.ExitStack in being.resources.
When resources are acquired at run-time it is important to use the
being.resources.manage_resources() context manager so that the collected
resources can be released at the end.
from being.networking import NetworkIn
from being.resources import manage_resources
with manage_resources():
# Creates and binds a socket internally
incoming = NetworkIn(address=('', 56790))
# Socket gets released here
The same logic applies to the CAN interface, RPi GPIO, port audio backend…
For comfort, some types get instantiated implicitly when needed. For example,
when creating a being.motors.blocks.CanMotor block, by default a
being.backends.CanBackend instance gets created as well. Similarly
every being.motion_player.MotionPlayer block needs a
being.clock.Clock and a being.content.Content instance.
The being.utils.SingleInstanceCache base class caches all these
instances. These de-facto global variables are an anti-pattern but opposed to
the classical singleton pattern single instantiation is not enforced and these
single instances are only used as default values. All classes, which make use
of single instances, also accept them via their initialize method (dependency
injection).
from being.utils import SingleInstanceCache
class Foo(SingleInstanceCache):
def __init__(self):
print('Foo gets initialized')
print('Initialized:', Foo.single_instance_initialized()) # Initialized: False
a = Foo.single_instance_setdefault() # Foo gets initialized
b = Foo.single_instance_setdefault()
print('a is b:', a is b) # a is b: True
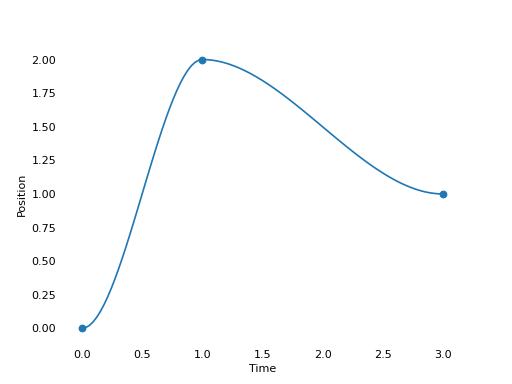
Splines are special mathematical functions. They are used to interpolate between values.
Being deals exclusively with piecewise polynomial parametric curves. This is a chain of multiple segments where each segment is a cubic polynomial spline in the Bernstein basis. Below is a plot with a scalar spline made out of two segments.
import matplotlib.pyplot as plt
from scipy.interpolate import BPoly
from being.plotting import plot_spline_2
# Polynomial coefficient matrix
c = [[0, 2], [0, 2], [2, 1], [2, 1]]
# Knots or breakpoints
x = [0, 1, 3]
spline = BPoly(c, x)
plot_spline_2(spline)
plt.xlabel('Time')
plt.ylabel('Position')
plt.show()
(Source code, png, hires.png, pdf)
The shape (k, m, ...) of the coefficient matrix c controls the nature
of the spline and its output format. k is the spline order and m the
number of segments or intervals. Concerning the output values:
shape (k, m): Scalar spline outputs 1.234.
shape (k, m, 1): One dimensional spline outputs [1.234].
shape (k, m, 3): Three dimensional spline outputs [1.234, 1.234, 1.234].
Note
Because of convience scalar splines are represented as one dimensional splines in being.
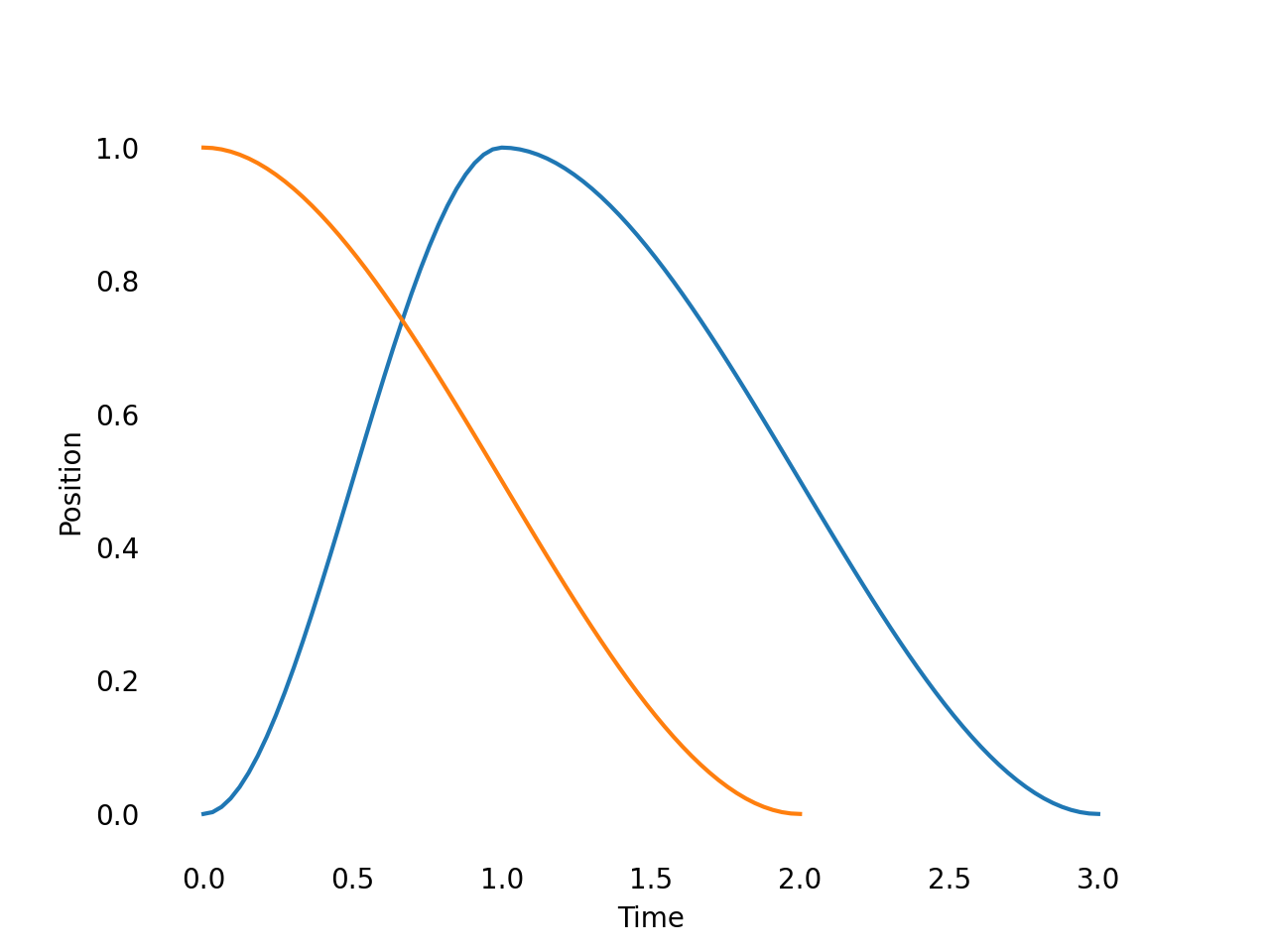
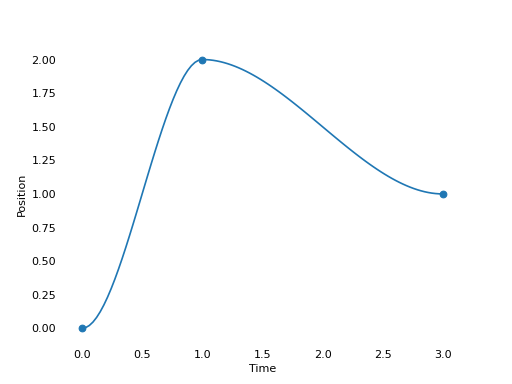
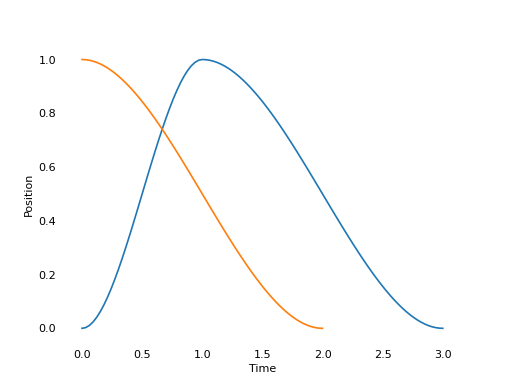
A being.curve.Curve is a container for splines. Each motion curve
has multiple individual splines. These are independent and do not share any
break points or coefficients. Each of these splines defines a motion channel
which can be routed to motors. A curve should have at least one spline.
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import BPoly
from being.curve import Curve
first = BPoly([[[0], [1]], [[0], [1]], [[1], [0]], [[1], [0]] ], [0, 1, 3])
second = BPoly([[[1]], [[1]], [[0]], [[0]]], [0, 2])
curve = Curve([first, second])
t = np.linspace(0, 3, 100)
plt.plot(t, curve(t, extrapolate=False))
plt.xlabel('Time')
plt.ylabel('Position')
plt.show()
(Source code, png, hires.png, pdf)
A being.content.Content instance manages all user defined motion
curves inside a directory. Curves are saved as JSON files in this folder.
The being.motion_player.MotionPlayer block plays motion curves on the
motors. It accepts motion commands messages as instructions for which curve
to schedule next. Curves are loaded from the content directory, sampled and
outputted via the position outputs
(being.motion_player.MotionPlayer.positionOutputs).

Motion Player steering multiple motors¶
Note
The reason for the additional positionOutputs attribute is, that at some point it was planed to add feedback connection to notify when a motion curve had been played succefully or not. outputs would then have an addional entry.
A motor block accepts target position and outputs actual position values.

Motor block input and output values.¶
Motor blocks come in different flavors, depending on the physical configuration
(linear vs. Rotary motors, different rotary motor variations). All of these are
represented by the different classes in being.motors.blocks.
Since many motors have relative encoders they need to be homed after turning them on so that they can orient them self and find their initial position.
Motor blocks can be enabled or disabled. This corresponds to the Operation Enabled and Ready to Switch On states of the CiA 402 State Machine.
By default, CAN motors are run in the Cyclic Synchronous Position (CSP)
operation mode. Every cycle a new target position value is send to the motor
via PDO. Trajectory generation is mostly done on the application side. Note
although, that this is handled very differently between the different vendors.
It is also possible to run motor blocks in the Profiled Position mode. In
this case, the target position input is ignored. Instead the motor block
accepts being.motors.definitions.PositionProfile messages which will
be relayed to the motor.
The CanMotors have a settings argument which can be used to apply custom
configurations to the motor. Settings are a dictionary with address to value
mappings. The address can also be a string with slashes (/ path syntax). In
this case the EDS object dictionary is used to resolve the target address.
Path parts can also be integer numbers (decimal, hexadecimal, …)
Note
Most motors are sensitive to the order in which settings are applied.
Therefore using a collections.OrderedDict is advised.
For switching to an arbitrary target state the CiA 402 State Machine needs
to be traversed in the right way. What complicates things is that this can take
an arbitrary amount of time. Two methods exists in the
being.cia_402.CiA402Node CanOpen remote node:
being.cia_402.CiA402Node.change_state(): Blocking with a timeout. This
is not suited for live operation since everything else will be blocked
including PDO communication and Sync messages (NMT operational).
being.cia_402.CiA402Node.state_switching_job(): Creates a Python
Generator which handles the state traversal. Responsibility for ticking the
Generator is with the caller. Kind of a pseudo coroutine which makes it
possible to interlace multiple state switchings with the normal operation.
A small example for the latter
"""This example illustrates how the state of multiple nodes can be
switched simultaneously.
"""
import time
from being.can.cia_402 import State
NODES = []
"""List of some connected CiA 402 node instances."""
jobs = [
node.state_switching_job(target=State.OPERATION_ENABLED)
for node in NODES
]
while jobs:
for job in jobs.copy(): # Copy because mutating while iterating
try:
# Ticking state switching job
next(job)
except StopIteration:
# Done with state switching for this job
jobs.remove(job)
time.sleep(0.1)
# Done with state switching
These state switching jobs are managed by the
being.motors.controller.Controller instances. The calling chain for
enabling a motor block is the following:
Motor block gets enabled
Motor block enables controller
Controllers creates state switching job
Calling the motor blocks update method, ticks the controller, ticks the active state switching job
A motor can be in the following homing states:
FAILED
UNHOMED
ONGOING
HOMED
Each controller has a homing instance which manages the homing of a motor. For
most cases the standard CiA 402 homing can be used
(being.motors.homing.CiA402Homing). However some motors do not support
the unofficial hard stop homing which is used in many Pathos projects.
Therefore there is a second homing implementation
being.motors.homing.CrudeHoming.
Once the NMT state is set to operational some motors expect periodic CAN messages which are on time. Namely RPDO and SYNC messages. Some motors will switch off and go into an error state if they do not receive these messages for a longer period.
Since Being is written in Python, single threaded (not counting third party dependencies) and mostly running on non-real-time operating systems this can not be guaranteed. When the work load gets to high e.g. with a complete web page reload our main loop drags behind and the critical messages can not be send. (Fun fact, on macOS 10.15 it is enough to open the spotlight search and every time one enters a character in the search field this will break out the being process. Also without a running web server).
To mitigate this a little there is the being.pacemaker.Pacemaker
thread. When activated this thread gets ticked by the main loop. If the main
loop is not on time (with some margin) the pacemaker will jump in and send out
the latest messages again to bridge the gap.
However, this only works for a subset of lags and is no guarantee. A non-real-time operating system can always pause the being process how it seems fit. This is why some controllers in Being have a auto recovery for the RPDO Timeout Error. The motor will jerk but at least it keeps on running.
As an outlook an improvement could be:
Operating system with a Preempt-RT Patch
Move the actual CAN bus / interface to its own, separated RT process and replace it with a proxy to forward communication via IPC